Basic Performance Parameters:
Full-range bending/stretching time of fingers (at maximum speed): 0.7 s
Full-range rotation time of thumb (at maximum speed): 0.7 s
Maximum active force of fingertips (excluding thumb) in stretched state: ±0.5 Kgf
Maximum active force of fingertips (excluding thumb) in bent state: ±1.0 Kgf
Maximum active force of thumb tip: ±1.0 Kgf
Basic Performance Parameters:
Weight (including wrist): 575g±5g
Maximum passive load for four fingers in bent state: 30 Kg
Maximum passive load for each finger in bent state: 10 Kg
Maximum passive load for each finger in stretched state: 8 Kg
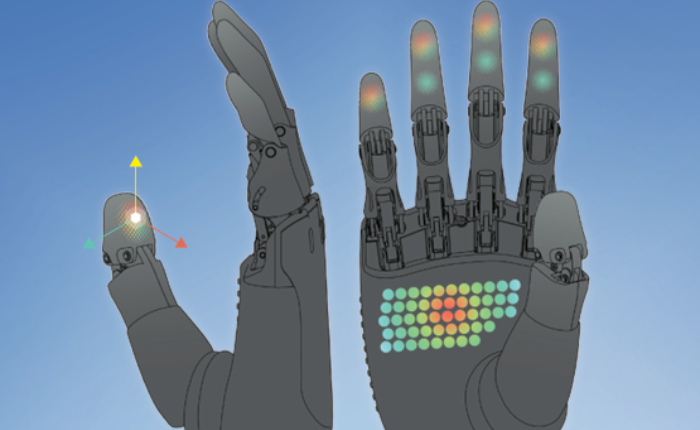
Force Sensor Parameters (3D Force):
Distal + Proximal Phalanx (Normal Force)
Sampling frequency: ≥50Hz
Range: 0.1N~25N
Repeatability accuracy: ±5%
Distal Phalanx (Tangential Force)
Range: 0.25N~25N
Directional resolution: 1°
Palm Dot Matrix Sensor Parameters:
Sampling frequency: 150Hz
Number of dots: 11×5
Normal Force:
Range: 0.1N~25N
Repeatability accuracy: ±20% (at 500g load)
 Business mailbox
Business mailbox Developer Center
Developer Center

 Business mailbox
Business mailbox Developer Center
Developer Center

4524777.png)
4968014.png)
4616333.png)
9123026.png)
5954418.png)
7507824.png)


